JOHN VAUGHAN | BRÜEL & KJÆR
DOWNLOAD PDF
Deze Application Note laat aan de hand van een aantal uitgewerkte voorbeelden zien hoe eenvoudig het is om roterende machines te balanceren. Eenvoudige methodes zullen worden gepresenteerd die gebruik maken van eenvoudige draagbare B&K instrumentatie om te meten aan roterende delen die in hun eigen lagers bij normale bedrijfssnelheden draaien. B&K machines die draaiende delen opnemen en de balanceermassa’s en posities onmiddellijk weergeven, worden beschreven in afzonderlijke publicaties over de balanceermachines Type 3905 en Type 3906.
De evenwichtsnormen die met de hier getoonde regelingen worden bereikt, steken gunstig af bij de resultaten die met veel gecompliceerdere en duurdere balanceermachines worden verkregen.
Wat is statisch balanceren?
Primair balanceren beschrijft het proces waarbij primaire krachten, veroorzaakt door ongebalanceerde massacomponenten in een roterend voorwerp, in één vlak kunnen worden opgelost en in evenwicht worden gebracht door een massa in alleen dat vlak toe te voegen. Aangezien het object nu in statische toestand volledig in balans zou zijn (maar niet noodzakelijkerwijs in dynamische toestand) wordt dit vaak statisch balanceren genoemd.
Wat is dynamisch balanceren?
Secundair balanceren beschrijft het proces waarbij primaire krachten en secundaire krachtparen, veroorzaakt door ongebalanceerde massacomponenten in een roterend object, kunnen worden opgelost in twee (of meer) vlakken en gebalanceerd door massatoenames in die vlakken toe te voegen.
Dit balanceringsproces wordt vaak Dynamisch Balanceren genoemd omdat de onbalans alleen zichtbaar wordt wanneer het object roteert. Nadat het object dynamisch is uitgebalanceerd, zou het zowel in statische als dynamische omstandigheden volledig in balans zijn.
Het verschil tussen statisch evenwicht en dynamisch evenwicht wordt geïllustreerd in Fig.1. Opgemerkt wordt dat wanneer de rotor stilstaat (statisch), de eindmassa’s elkaar in evenwicht kunnen houden. Bij rotatie (dynamisch) zal echter een sterke onbalans optreden.
Basistheorie
Een voorwerp dat bij rotatie trillingen aan zijn lagers overbrengt, wordt gedefinieerd als “ongebalanceerd”. De lagertrilling wordt veroorzaakt door de interactie van de aanwezige ongebalanceerde massacomponenten met de radiale versnelling ten gevolge van de rotatie, die samen een centrifugale kracht opwekken.
Als de massacomponenten roteren, roteert ook de kracht en probeert het voorwerp in de lagering langs de lijn van de kracht te bewegen. Vandaar dat elk punt op het lager een fluctuerende kracht zal ondervinden.
In de praktijk zal de kracht op een lager bestaan uit een primaire kracht ten gevolge van onevenwichtige massacomponenten in of nabij het vlak van het lager, en een secundaire kracht ten gevolge van onevenwichtige koppelcomponenten uit de andere vlakken.
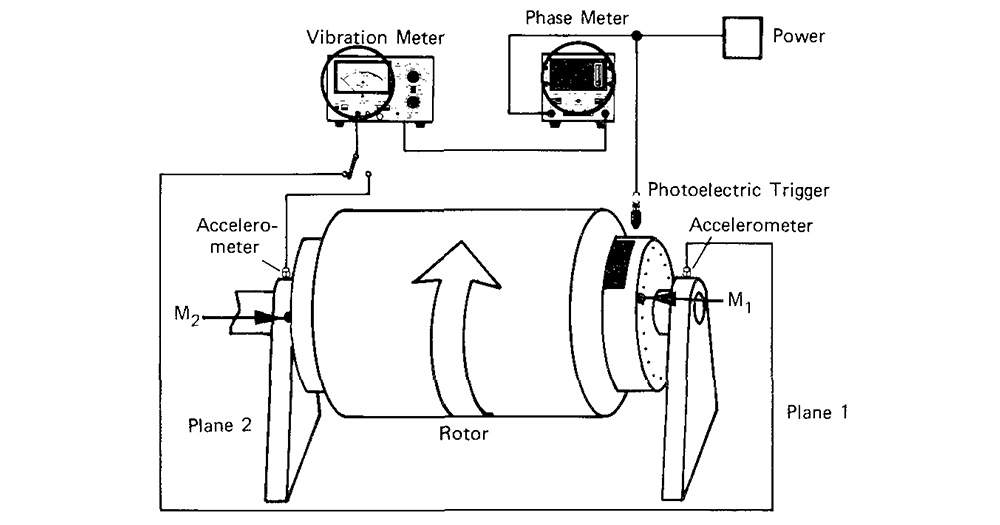
Als een versnellingsmeter op de lagerbehuizing is gemonteerd, kan de fluctuerende trilkracht worden gedetecteerd, en een elektrisch signaal naar een trillingsmeter worden gezonden. Het aangegeven trillingsniveau is recht evenredig met de resultante van de ongebalanceerde massa’s. De richting waarin deze resultante werkt (d.w.z. de straal die de middelpuntvliedende kracht bevat) kan nauwkeurig worden bepaald door de fase van het fluctuerende signaal dat de trillingsmeter verlaat, te vergelijken met een standaard periodiek signaal dat wordt verkregen vanaf een bepaalde referentiepuntpositie op het draaiende voorwerp.
Het is nu mogelijk om de onbalans op het lager te definiëren door middel van een vector.
De lengte wordt gegeven door de grootte van de onbalanskracht (het gemeten trillingsniveau) en de hoek wordt gegeven door de werkingsrichting van de kracht. Verder, als de resulterende ongebalanceerde kracht op een lager kan worden opgelost in zijn primaire (eerste-orde momenten) en secundaire (tweede-orde momenten) componenten, zal het mogelijk zijn het voorwerp te balanceren.
Algemene meetmethoden

Het trillingsniveau kan worden gemeten in termen van versnelling, snelheid, of verplaatsing. Aangezien de meeste balanceringsnormen zijn opgesteld in termen van snelheid, een erfenis uit de tijd dat trillingen werden gemeten met mechanische, snelheidsgevoelige omzetters, zal meestal de snelheid als parameter worden gekozen.
Het gebruik van versnellingsniveaus zal de neiging hebben de hogere frequentiecomponenten te benadrukken, terwijl verplaatsing de lage frequentiecomponenten zal benadrukken.
- Static And Dynamic Balancing Of Rigid Rotors
- Modal Analysis and Simulation: Structural Testing Part II
- Environmental Noise Measurement