JOHN VAUGHAN | BRÜEL & KJÆR
DOWNLOAD PDF
Această notă de aplicare va demonstra, cu ajutorul mai multor exemple lucrate, cât de ușor este să echilibrați mașinile rotative. Vor fi prezentate metode simple care utilizează instrumente portabile simple B&K pentru a măsura pe piesele rotative care rulează în rulmenții proprii la viteze normale de funcționare. Mașinile B&K care acceptă piese rotative și afișează imediat masele și pozițiile de echilibrare sunt descrise în publicații separate despre mașinile de echilibrare tip 3905 și tip 3906.
Standardele de echilibrare obținute prin aranjamentele prezentate aici se compară favorabil cu rezultatele obținute cu mașini de echilibrare mult mai complicate și mai scumpe.
Ce este Echilibrarea statică?
Echilibrarea primară descrie procesul prin care forțele primare cauzate de componente de masă dezechilibrate într-un obiect rotativ pot fi resoluționate într-un singur plan și echilibrate prin adăugarea unei mase numai în acel plan. Deoarece obiectul ar fi acum complet echilibrat în condiții statice (dar nu neapărat în dinamică), acest lucru este adesea cunoscut sub numele de echilibrare statică.
Ce este echilibrarea dinamică?
Echilibrarea secundară descrie procesul prin care forțele primare și cuplurile de forțe secundare cauzate de componente de masă dezechilibrate într-un obiect în rotație pot fi rezolvate în două (sau mai multe) planuri și echilibrate prin adăugarea de creșteri de masă în acele planuri.
Acest proces de echilibrare este adesea cunoscut sub numele de echilibrare dinamică, deoarece dezechilibrul devine evident numai atunci când obiectul se rotește. După ce a fost echilibrat dinamic, obiectul ar fi complet echilibrat atât în condiții statice, cât și dinamice.
Diferența dintre echilibrul static și echilibrul dinamic este ilustrată în Fig.1. Se va observa că, atunci când rotorul este staționar (static), masele de capăt se pot echilibra reciproc. Cu toate acestea, atunci când se rotește (dinamic) se va produce un dezechilibru puternic.
Teorie de bază
Un obiect care transmite vibrații la rulmenții săi atunci când se rotește este definit ca fiind „dezechilibrat”. Vibrația rulmenților este produsă de interacțiunea oricăror componente de masă dezechilibrată prezente cu accelerația radială datorată rotației, care împreună generează o forță centrifugă.
În timp ce componentele de masă se rotesc, forța se rotește și ea și încearcă să deplaseze obiectul în rulmenții săi de-a lungul liniei de acțiune a forței. Prin urmare, orice punct de pe rulment va resimți o forță fluctuantă.
În practică, forța la un rulment va fi alcătuită dintr-o forță primară datorată componentelor de masă dezechilibrate în planul rulmentului sau în apropierea acestuia și o forță secundară datorată componentelor de cuplu dezechilibrate din celelalte planuri.
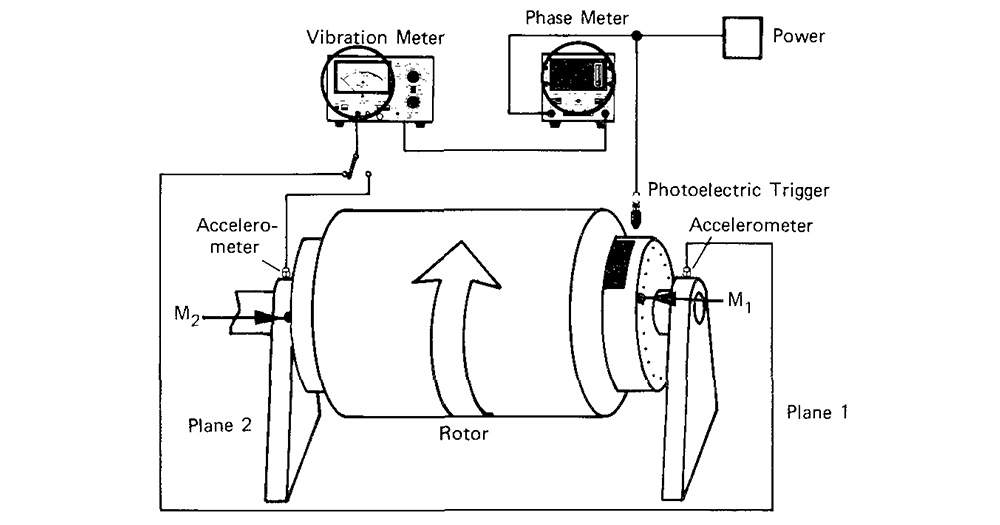
Dacă un accelerometru este montat pe carcasa rulmentului, forța de vibrație fluctuantă poate fi detectată, iar un semnal electric poate fi trimis la un contor de vibrații. Nivelul de vibrație indicat este direct proporțional cu rezultanta maselor dezechilibrate. Direcția în care acționează această rezultantă (adică raza care conține forța centrifugă) poate fi determinată cu exactitate prin compararea fazei semnalului fluctuant care părăsește contorul de vibrații cu un semnal periodic standard obținut dintr-o anumită poziție de referință de pe obiectul rotativ.
Este acum posibil să se definească dezechilibrul la nivelul rulmentului cu ajutorul unui vector.
Lungimea este dată de mărimea forței de dezechilibru (nivelul de vibrație măsurat), iar unghiul este dat de direcția de acțiune a forței. Mai mult, dacă forța dezechilibrată rezultată la un rulment poate fi rezolvată în componentele sale primare (momente de ordinul întâi) și secundare (momente de ordinul al doilea), va fi posibilă echilibrarea obiectului.
Metode generale de măsurare

Nivelul de vibrație poate fi măsurat în termeni de accelerație, viteză sau deplasare. Cu toate acestea, deoarece majoritatea standardelor de echilibrare sunt scrise în termeni de viteză, o moștenire a vremurilor în care vibrațiile erau măsurate cu ajutorul unor traductoare mecanice sensibile la viteză, de obicei, viteza va fi parametrul ales.
Utilizarea nivelurilor de accelerație va avea tendința de a accentua componentele de frecvență înaltă, în timp ce deplasarea va accentua componentele de frecvență joasă.
- Static And Dynamic Balancing Of Rigid Rotors
- Modal Analysis and Simulation: Structural Testing Part II
- Environmental Noise Measurement