JOHN VAUGHAN | BRÜEL & KJÆR
DOWNLOAD PDF
Cette note d’application démontrera, à l’aide de plusieurs exemples travaillés, combien il est facile d’équilibrer les machines tournantes. Des méthodes simples seront présentées, qui font appel à une instrumentation B&K portable simple pour effectuer des mesures sur des pièces rotatives tournant dans leurs propres roulements à des vitesses de fonctionnement normales. Les machines B&K qui acceptent les pièces rotatives et affichent immédiatement les masses et les positions d’équilibrage sont décrites dans des publications séparées sur les machines à équilibrer type 3905 et type 3906.
Les normes d’équilibre obtenues par les arrangements présentés ici se comparent favorablement aux résultats obtenus par des machines à équilibrer beaucoup plus compliquées et coûteuses.
Qu’est-ce que l’équilibre statique ?
L’équilibrage primaire décrit le processus par lequel les forces primaires causées par des composants de masse déséquilibrés dans un objet rotatif peuvent être résolues à nouveau dans un plan et équilibrées en ajoutant une masse dans ce plan seulement. Comme l’objet serait maintenant complètement équilibré dans la condition statique (mais pas nécessairement dans la dynamique), ceci est souvent connu comme l’équilibrage statique.
Qu’est-ce que l’équilibre dynamique ?
L’équilibrage secondaire décrit le processus par lequel les forces primaires et les couples de forces secondaires causés par des composants de masse déséquilibrés dans un objet en rotation peuvent être résolus en deux plans (ou plus) et équilibrés en ajoutant des incréments de masse dans ces plans.
Ce processus d’équilibrage est souvent connu sous le nom d’équilibrage dynamique parce que le déséquilibre ne devient apparent que lorsque l’objet tourne. Après avoir été équilibré dynamiquement, l’objet serait complètement équilibré dans les deux conditions statiques et dynamiques.
La différence entre l’équilibre statique et l’équilibre dynamique est illustrée à la figure 1. On observera que lorsque le rotor est immobile (statique), les masses d’extrémité peuvent s’équilibrer entre elles. Cependant, lorsqu’il tourne (dynamique), un fort déséquilibre sera constaté.
Théorie de base
Un objet qui communique des vibrations à ses paliers lorsqu’il tourne est défini comme « déséquilibré ». La vibration du roulement est produite par l’interaction de tout composant de masse déséquilibré présent avec l’accélération radiale due à la rotation qui, ensemble, génère une force centrifuge.
Comme les composants de masse tournent, la force tourne aussi et tente de déplacer l’objet dans ses paliers le long de la ligne d’action de la force. Par conséquent, tout point du palier subira une force fluctuante.
Dans la pratique, la force au niveau d’un palier sera composée d’une force primaire due à des composants de masse déséquilibrés dans ou près du plan du palier, et d’une force secondaire due à des composants de couple déséquilibrés provenant des autres plans.
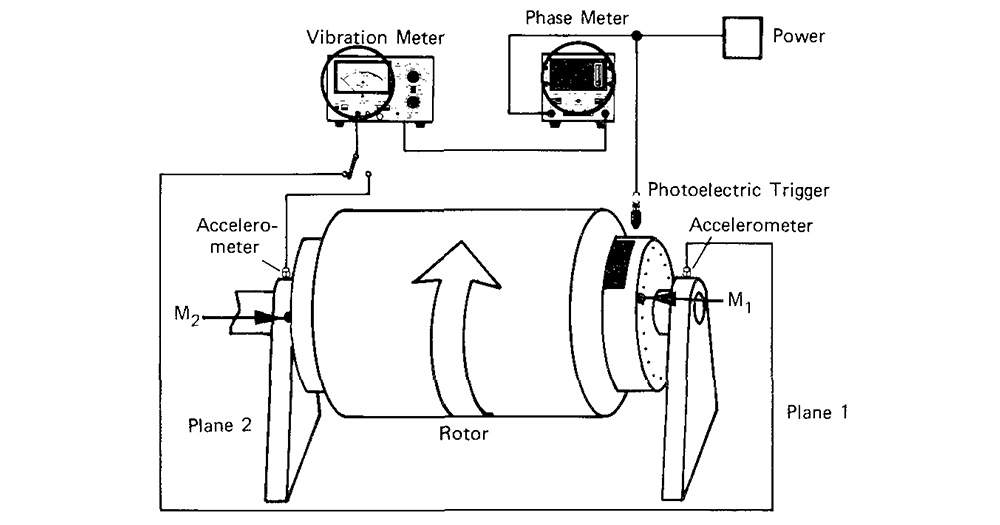
Si un accéléromètre est monté sur le logement du palier, la force de vibration fluctuante peut être détectée, et un signal électrique envoyé à un vibromètre. Le niveau de vibration indiqué est directement proportionnel à la résultante des masses déséquilibrées. La direction dans laquelle cette résultante agit (c’est-à-dire le rayon contenant la force centrifuge) peut être déterminée de manière précise en comparant la phase du signal fluctuant sortant du vibromètre avec un signal périodique standard obtenu à partir d’une certaine position de référence sur l’objet en rotation.
Il est maintenant possible de définir le déséquilibre au niveau du palier au moyen d’un vecteur.
La longueur est donnée par la magnitude de la force déséquilibrée (le niveau de vibration mesuré) et l’angle est donné par la direction d’action de la force. De plus, si la force déséquilibrée résultante au niveau d’un roulement peut être résolue en ses composantes primaires (moments de premier ordre) et secondaires (moments de second ordre), il sera possible d’équilibrer l’objet.
Méthodes de mesure générales

Le niveau de vibration peut être mesuré en termes d’accélération, de vitesse ou de déplacement. Cependant, comme la plupart des normes d’équilibrage sont rédigées en termes de vitesse, héritage de l’époque où les vibrations étaient mesurées par des transducteurs mécaniques sensibles à la vitesse, c’est généralement la vitesse qui sera le paramètre choisi.
L’utilisation des niveaux d’accélération aura tendance à mettre l’accent sur les composantes de plus haute fréquence, tandis que le déplacement mettra l’accent sur les composantes de basse fréquence.
- Equilibrage statique et dynamique des rotors rigides
- Analyse modale et simulation : Structural Testing Part II
- Environmental Noise Measurement