JOHN VAUGHAN | BRÜEL & KJÆR
DOWNLOAD PDF
Questa nota applicativa dimostrerà, con l’aiuto di diversi esempi pratici, quanto sia facile equilibrare le macchine rotanti. Verranno presentati metodi semplici che fanno uso di una semplice strumentazione portatile B&K per misurare su parti rotanti che girano nei propri cuscinetti alle normali velocità di funzionamento. Le macchine B&K che accettano parti rotanti e visualizzano immediatamente le masse e le posizioni di bilanciamento sono descritte in pubblicazioni separate sulle Macchine Equilibratrici Tipo 3905 e Tipo 3906.
Gli standard di bilanciamento raggiunti dai dispositivi qui mostrati si confrontano favorevolmente con i risultati ottenuti da macchine equilibratrici molto più complicate e costose.
Cos’è il bilanciamento statico?
Il bilanciamento primario descrive il processo in cui le forze primarie causate da componenti di massa sbilanciate in un oggetto rotante possono essere risolte in un piano ed equilibrate aggiungendo una massa solo in quel piano. Poiché l’oggetto sarebbe ora completamente bilanciato nella condizione statica (ma non necessariamente in quella dinamica) questo è spesso noto come bilanciamento statico.
Che cos’è l’equilibrio dinamico?
Il bilanciamento secondario descrive il processo in cui le forze primarie e le coppie di forze secondarie causate da componenti di massa sbilanciate in un oggetto rotante possono essere risolte in due (o più) piani e bilanciate aggiungendo incrementi di massa in quei piani.
Questo processo di bilanciamento è spesso conosciuto come bilanciamento dinamico perché lo squilibrio diventa evidente solo quando l’oggetto è in rotazione. Dopo essere stato bilanciato dinamicamente, l’oggetto sarebbe completamente bilanciato sia in condizioni statiche che dinamiche.
La differenza tra bilanciamento statico e bilanciamento dinamico è illustrata in Fig.1. Si osserva che quando il rotore è fermo (statico) le masse finali possono bilanciarsi a vicenda. Tuttavia, quando ruota (dinamico) si verifica un forte squilibrio.
Teoria di base
Un oggetto che imprime vibrazioni ai suoi cuscinetti quando ruota è definito “squilibrato”. La vibrazione del cuscinetto è prodotta dall’interazione di qualsiasi componente di massa sbilanciata presente con l’accelerazione radiale dovuta alla rotazione, che insieme generano una forza centrifuga.
Come i componenti di massa ruotano, anche la forza ruota e cerca di spostare l’oggetto nel suo cuscinetto lungo la linea d’azione della forza. Quindi qualsiasi punto sul cuscinetto sperimenterà una forza fluttuante.
In pratica, la forza su un cuscinetto sarà composta da una forza primaria dovuta a componenti di massa sbilanciate nel o vicino al piano del cuscinetto, e una forza secondaria dovuta a componenti di coppia sbilanciate dagli altri piani.
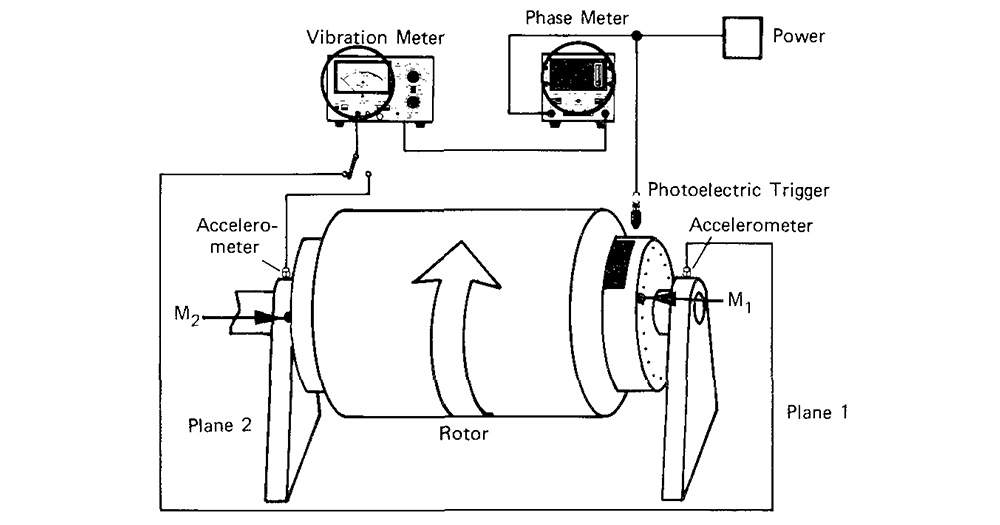
Se un accelerometro è montato sull’alloggiamento del cuscinetto, la forza di vibrazione fluttuante può essere rilevata, e un segnale elettrico inviato a un vibrometro. Il livello di vibrazione indicato è direttamente proporzionale alla risultante delle masse sbilanciate. La direzione in cui agisce questa risultante (cioè il raggio che contiene la forza centrifuga) può essere determinata in modo preciso confrontando la fase del segnale fluttuante che esce dal vibrometro con un segnale periodico standard ottenuto da una certa posizione di riferimento sull’oggetto rotante.
È ora possibile definire lo squilibrio sul cuscinetto per mezzo di un vettore.
La lunghezza è data dalla grandezza della forza squilibrata (il livello di vibrazione misurato) e l’angolo è dato dalla direzione di azione della forza. Inoltre, se la forza sbilanciata risultante su un cuscinetto può essere risolta nelle sue componenti primarie (momenti del primo ordine) e secondarie (momenti del secondo ordine), sarà possibile equilibrare l’oggetto.
Metodi di misurazione generali

Il livello di vibrazione può essere misurato in termini di accelerazione, velocità o spostamento. Tuttavia, poiché la maggior parte degli standard per il bilanciamento sono scritti in termini di velocità, un’eredità dei giorni in cui le vibrazioni erano misurate da trasduttori meccanici sensibili alla velocità, di solito la velocità sarà il parametro scelto.
L’uso dei livelli di accelerazione tenderà ad enfatizzare le componenti a più alta frequenza, mentre lo spostamento enfatizzerà le componenti a bassa frequenza.
- Bilanciamento statico e dinamico di rotori rigidi
- Analisi modale e simulazione: Structural Testing Part II
- Environmental Noise Measurement