JOHN VAUGHAN | BRÜEL & KJÆR
DOWNLOAD PDF
Denna tillämpningsanvisning visar med hjälp av flera fungerande exempel hur enkelt det är att balansera roterande maskiner. Enkla metoder kommer att presenteras som utnyttjar enkel bärbar B&K-instrumentering för att mäta på roterande delar som löper i sina egna lager vid normala driftshastigheter. B&K-maskiner som tar emot roterande delar och visar balansmassor och positioner omedelbart beskrivs i separata publikationer om balanseringsmaskinerna typ 3905 och typ 3906.
Balansstandarder som uppnås genom de arrangemang som visas här kan jämföras med de resultat som erhålls från betydligt mer komplicerade och dyra balanseringsmaskiner.
Vad är statisk balansering?
Primär balansering beskriver den process där primära krafter som orsakas av obalanserade masskomponenter i ett roterande objekt kan re-lösas in i ett plan och balanseras genom att lägga till en massa endast i det planet. Eftersom objektet nu skulle vara helt balanserat i statiskt tillstånd (men inte nödvändigtvis i dynamiskt tillstånd) kallas detta ofta för statisk balansering.
Vad är dynamisk balansering?
Sekundär balansering beskriver den process där primära krafter och sekundära kraftpar som orsakas av obalanserade masskomponenter i ett roterande objekt kan upplösas i två (eller flera) plan och balanseras genom att lägga till massökningar i dessa plan.
Den här balanseringsprocessen kallas ofta dynamisk balansering, eftersom obalansen bara blir uppenbar när objektet roterar. Efter att ha balanserats dynamiskt skulle objektet vara helt balanserat i både statiska och dynamiska förhållanden.
Skillnaden mellan statisk balans och dynamisk balans illustreras i fig.1. Det kommer att observeras att när rotorn är stationär (statisk) kan ändmassorna balansera varandra. När de roterar (dynamiskt) uppstår dock en kraftig obalans.
Grundläggande teori
Ett föremål som ger vibrationer till sina lager när det roterar definieras som ”obalanserat”. Lagervibrationen produceras av samspelet mellan eventuella obalanserade masskomponenter som finns närvarande och den radiella accelerationen på grund av rotationen som tillsammans genererar en centrifugalkraft.
När masskomponenterna roterar roterar också kraften och försöker förflytta föremålet i dess lager längs kraftens verkningslinje. Därför kommer varje punkt på lagret att uppleva en fluktuerande kraft.
I praktiken kommer kraften vid ett lager att bestå av en primär kraft på grund av obalanserade masskomponenter i eller nära lagrets plan, och en sekundär kraft på grund av obalanserade parkomponenter från andra plan.
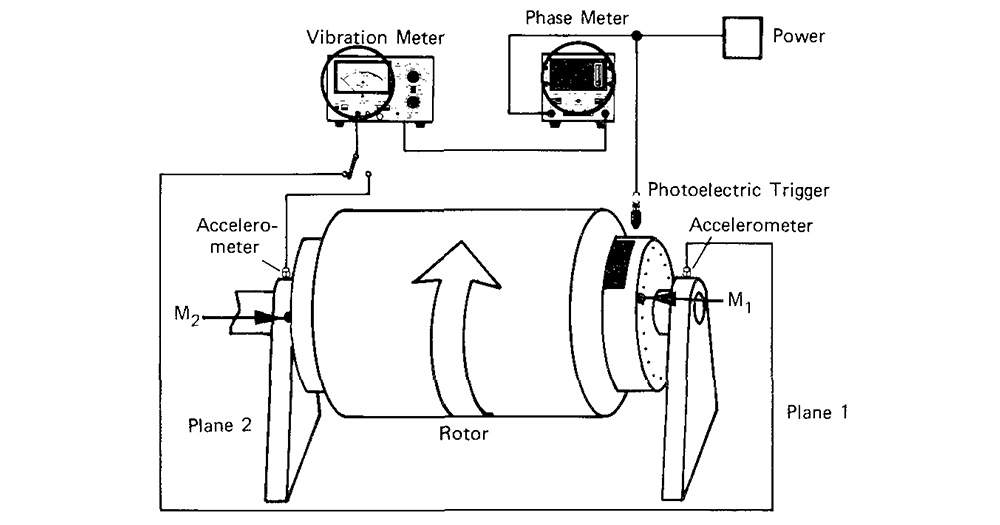
Om en accelerometer monteras på lagrets hölje kan den fluktuerande vibrationskraften detekteras, och en elektrisk signal skickas till en vibrationsmätare. Den indikerade vibrationsnivån är direkt proportionell mot resultanten av de obalanserade massorna. Den riktning i vilken denna resultant verkar (dvs. den radie som innehåller centrifugalkraften) kan bestämmas på ett exakt sätt genom att jämföra fasen i den fluktuerande signal som lämnar vibrationsmätaren med en periodisk standardsignal som erhålls från en viss referensposition på det roterande objektet.
Det är nu möjligt att definiera obalansen vid lagret med hjälp av en vektor.
Längden ges av storleken på den obalanserade kraften (den uppmätta vibrationsnivån) och vinkeln ges av kraftens verkningsriktning. Om den resulterande obalanserade kraften vid ett lager dessutom kan upplösas i dess primära (moment av första ordningen) och sekundära (moment av andra ordningen) komponenter blir det möjligt att balansera objektet.
Allmänna mätmetoder

Vibrationsnivån kan mätas i form av acceleration, hastighet eller förskjutning. Eftersom de flesta standarder för balansering är skrivna i hastighetstermer, ett arv från den tid då vibrationer mättes med mekaniska hastighetskänsliga givare, är hastigheten vanligtvis den valda parametern.
Användningen av accelerationsnivåer tenderar att betona komponenter med högre frekvens, medan förskjutning betonar komponenter med låg frekvens.
- Statisk och dynamisk balansering av styva rotorer
- Modal analys och simulering: Structural Testing Part II
- Environmental Noise Measurement